Amazon倉庫機械人新突破 Vulcan觸感機械人像人手般執貨入庫
|
ezone.hk 編輯部
| 18-06-2025 20:57 |
在Google
追蹤《e-zone》
追蹤《e-zone》

Amazon最新的Vulcan機械人採用突破性的觸感技術,能夠像人類一樣「摸索」著將貨品放入或取出布料儲存架。這項技術顛覆了傳統工業機械人「避免接觸」的設計理念,為自動化倉儲帶來革命性改變。
從試點到量產 準備大規模部署
Amazon在德國多特蒙德舉行的「Delivering the Future」研討會上宣布,Vulcan機械人已完成試點測試,準備進入Beta測試階段。試點項目在華盛頓州斯波坎的物流中心部署了6台Vulcan Stow機械人,Beta測試將在同一設施增加30台機械人,隨後會在德國設施進行更大規模部署,屆時Vulcan Stow和Vulcan Pick將協同運作。
革命性觸感技術 顛覆傳統機械人設計

Vulcan機械人的最大突破在於其機械臂末端工具配備了六軸力量和扭矩感測器,能夠測量各個方向的接觸力。這與目前Amazon物流中心使用的機械臂截然不同——傳統機械人只能從輸送帶和開頂箱中取物,必須避免接觸其他物品。

Amazon Robotics應用科學總監Aaron Parness解釋:「傳統工業自動化從90年代開始就建立在防止接觸的基礎上,機械人只依靠視覺和關節位置資訊運作。但Vulcan真正創新之處是結合了觸覺和視覺。」
他以一個生動的例子說明:「當你從桌上撿起一枚硬幣時,你不會精確地指揮手指到達硬幣的特定位置。你會先觸碰桌面,然後沿著桌面滑動手指直到接觸硬幣,感覺到硬幣後才會將其抓起。Vulcan機械人正是模仿這種運作方式。」
專門設計的末端工具 應對複雜儲存環境
Vulcan機械人需要處理的布料儲存架就像一組小隔間,只能從正面進入,裡面的物品隨機堆放,並用彈性帶固定。這種環境下,幾乎不可能在不接觸其他物品和架壁的情況下取出或放入物品。
Vulcan Pick(取貨機械人):使用吸盤裝置作為末端工具,配備深度相機提供實時回饋,監測取貨操作對箱內物品位置的影響。
Vulcan Stow(入庫機械人):使用平行板夾具,每塊板都內置輸送帶。夾具到位後保持靜止,由輸送帶將物品滑入位置。還配備可伸縮的鋁製附件(類似廚房鍋鏟),用於推開箱內物品騰出空間。
兩種機械人都有第二隻機械臂,末端工具是鉤子,用於拉下或推上覆蓋儲存箱前方的彈性帶。
AI視覺系統精準識別 深度學習優化操作
入庫操作流程
Vulcan Stow系統配備三對立體相機,通過冗餘立體成像建立儲存架及其內容的精確3D模型。系統使用三個深度學習模型分別對箱內影像進行分割:彈性帶分割、儲存格分割和物品分割。
由於彈性帶會影響成像,團隊使用生成式AI在合成箱內影像中添加彈性帶,訓練成像演算法。系統通過卷積運算識別可插入物品的空間,並生成一組「可行性指標」(affordances),指示物品插入位置和需要移動物品的位置。
取貨操作流程
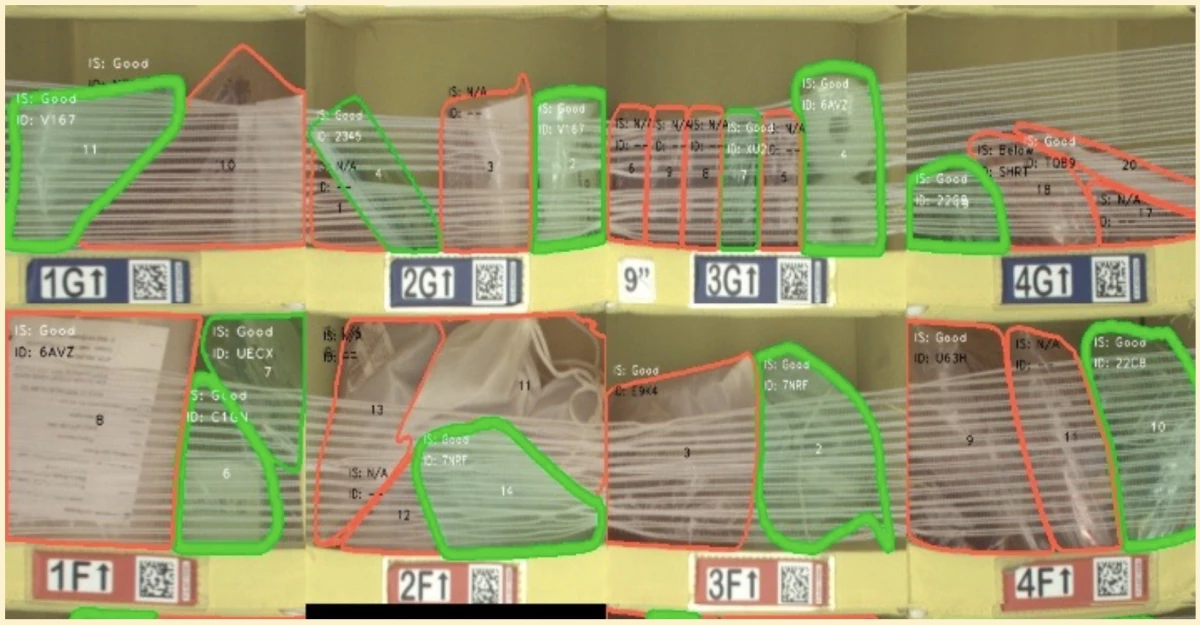
取貨操作首先判斷目標物品是否適合機械人提取——如果被太多其他物品阻擋,則交由人工處理。取貨機械人使用結構光(紅外線圖案)測量深度,並使用改良的MaskDINO神經網絡模型進行影像分割,將物品分為四類:
- 非物品(如彈性帶或金屬條)
- 狀態良好的物品(無阻礙)
- 位於其他物品下方的物品
- 被其他物品阻擋的物品
系統使用對比學習訓練的產品匹配模型,無需掃描條碼即可識別目標物品。這個模型能夠在不同角度和光線條件下識別同一產品。
開創機械人操作新範式
Parness認為這代表了機械人操作的新範式:「從『只能在自由空間移動』或『只能觸碰最上層物品』,到現在能夠處理各種物品,像在玩具箱底部找玩具,或處理易碎的雜貨。我認為這種力回饋、高接觸式操作方式在未來20年將有廣泛應用。」
對物流業的深遠影響
Vulcan機械人專門處理儲存架最高和最低層的操作,而人類員工則專注於中間層和需要特殊處理的物品(如液體容器)。這種人機協作模式不僅提高效率,還減少了員工爬梯子的安全風險。
隨著電商持續增長,這種創新技術將幫助Amazon和其他物流企業應對日益增長的訂單需求,同時保持高效率和準確性。對香港這樣的物流樞紐來說,這類技術的應用將進一步提升競爭力。
Source:AWS
【延伸閱讀】